首页
首页 飞语
飞语 我的
我的 反馈
反馈- 品牌
- 分类
- 筛选
 拨号
拨号




液体装卸臂主要由旋转接头、臂体(包括内臂、外臂、垂管等)、平衡系统、控制系统以及底座等部分组成。
旋转接头:是装卸臂的关键部件,负责连接输送管道和装卸臂,使得液体能够顺畅地流动。旋转接头能够实现360度的自由旋转,从而适应不同位置、不同角度的装卸需求,并且其密封性能优越,能够有效防止泄漏。
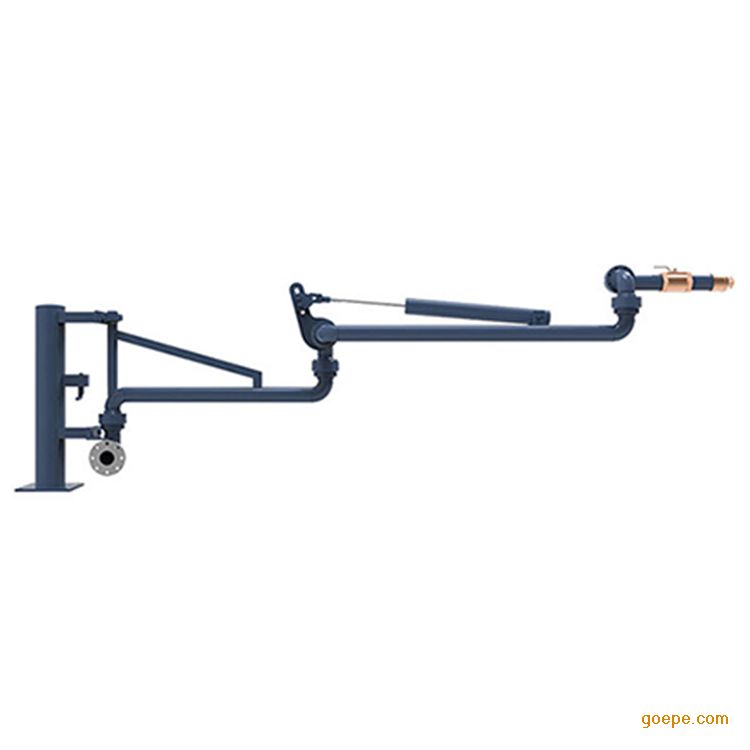
臂体:是装卸臂的主体部分,负责调整液体的流向和角度,以满足不同的装卸需求。臂体通常采用高强度材料制成,以确保其在各种恶劣环境下的稳定性和耐用性。臂体的长度和角度可调,以适应不同规模的储罐和运输车辆。
平衡系统:用于保持装卸臂在工作过程中的平衡,防止因重力或外力引起的晃动和偏移,确保装卸过程的稳定。
控制系统:是装卸臂的“大脑”,通过电气或液压方式控制装卸臂的旋转、升降和伸缩等动作,实现自动化和智能化操作。
底座:起到固定和支撑整个装卸臂的作用,确保其在工作过程中的稳定性。
相较于传统的装卸方式,液体装卸臂具有显著的优势:
高效率:装卸臂能够快速、准确地完成液体的装卸任务,大大提高了工作效率,降低了人工成本。
安全性高:装卸臂的设计充分考虑了安全因素,如防泄漏、防火、防静电等,大大降低了事故发生的概率。
适应性强:装卸臂能够适应不同规格、不同位置的储罐和运输车辆,具有很强的通用性和灵活性。
环保节能:装卸臂在装卸过程中能够减少能源消耗和废弃物排放,符合绿色、环保的发展趋势。
| 品牌: | 华德 |
| 型号: | AL2503 |
| 加工定制: | 是 |
| 用途: | 流体装卸 |
| 产地: | 连云港 |
| 温度: | -196~256℃ |
| 规格: | 各种主流规格定制 |
| 质检: | 石油库设计规范标准 |